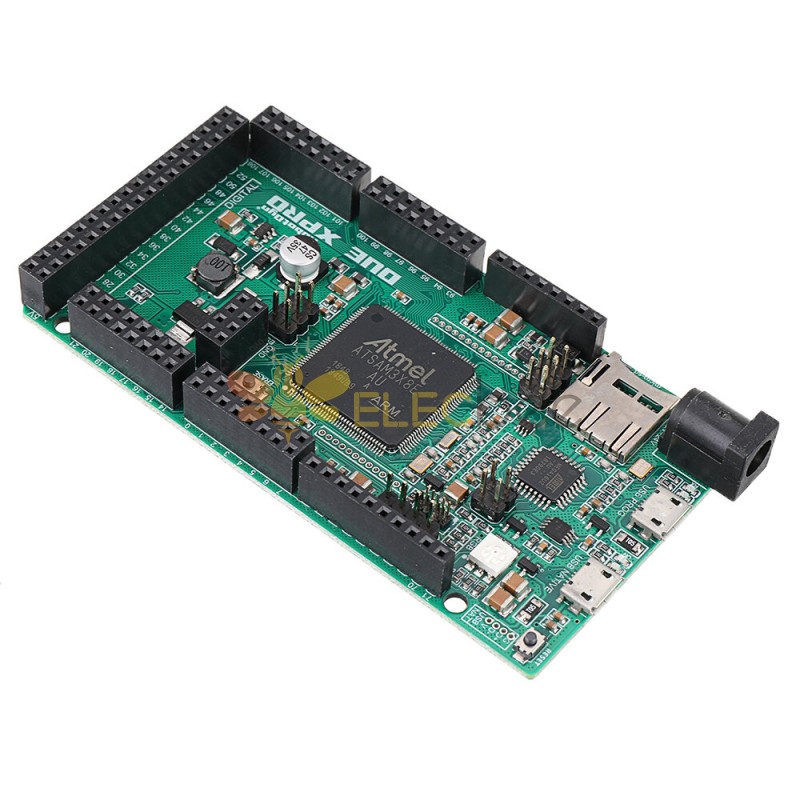
This is a SAM3X8E ARM Cortex-M3 based microcontroller board. This is one of the few boards, based on the 32-bit ARM core. It is upgraded version of the regular ArduinoDUO board, it has 98 digital inputs/outputs (that’s 30 more than the original model), 12 analog inputs, 4 UART (hardware serial ports), 84 MHz clock frequency, USB OTG connection, 2 DACs (D / A), TWI, power connector, SPI header, JTAG header, reset button and erase button. Also on board can find Micro-SD card reader and socket for Wi-Fi module ESP-01.
The controller works on a 3.3V logiclevel. The board has the USB interface, simply connect it to your computer with a micro-USB cable, or connect it with an AC adapter or battery to start working with it. RobotDyn DUE XPRO is compatible with allArduino supported devices.
IOREF:
Allows the attached display with the correct configuration to adapt to the voltage provided by the board. This ensures that the screen is compatible with a 3.3V board, such as the Due and AVR boards, which operate at 5 V.
Power:
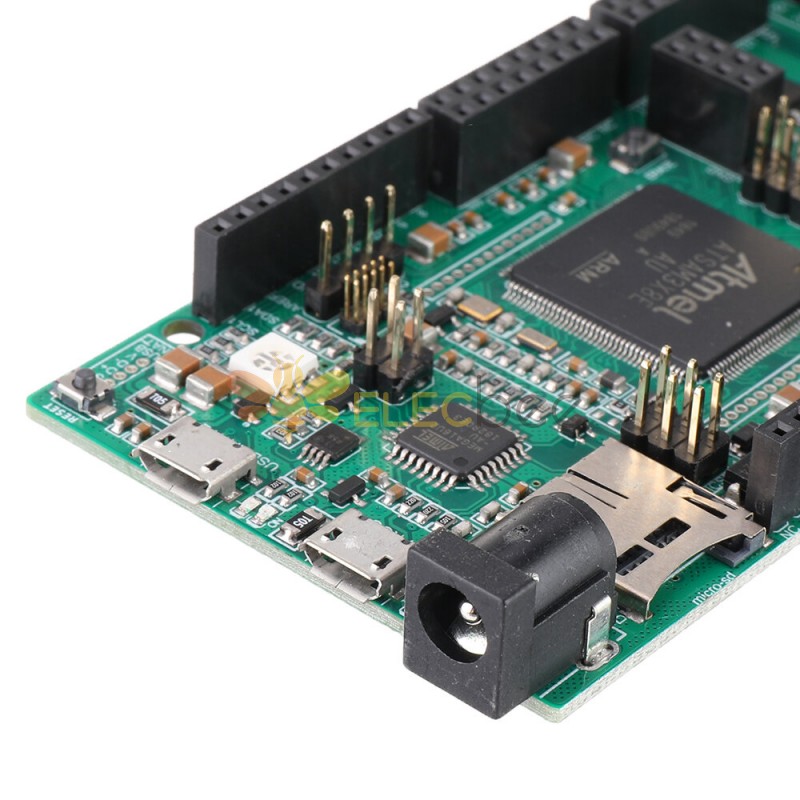
RobotDyn DUEXPRO can be powered by a USB connector or from an external power source. The power source is selected automatically. External (non-USB) power can be supplied either from the AC adapter to the direct current or from the battery. The adapter can be connected by inserting a 2.1 mm center-positive plug into the card's power connector. Battery pins can be plugged into the GND and VIN pins of the POWER connector. The board can operate from an external power source from 6 to 20 volts, the recommended range is 7 to 12 volts. Power pins are as follows:
VIN - The input voltage on the Arduinoboard when using an external power supply (as opposed to 5 volts from a USB connection). You can power the board through this contact, or access it if you power it via USB cable.
5V - This pin output provides a 5V current to the board with the help of adjustable voltage regulator. The board can be powered from a DC power connector (7–12V), a USB connector (5V), or a VIN pin on the board (7–12V). Applying voltage through the 5 V or 3.3 V pins bypasses the regulator, so make sure that the voltage is stable and within the acceptable range.
3V - Power supply 3.3 V from the built-in regulator. The maximum current consumption is 800 mA. This controller also provides power to the SAM3X microcontroller.
GND – Ground pins.
IOREF - This pin on the DUEXPRO board provides the reference source with which the microcontroller operates. A properly configured screen can read the voltage on the IOREF contact and select the appropriate power source or turn on the voltage converters at the outputs, to operate on 5V or 3.3V.
Memory:
SAM3X has 512 KB (2 blocks of 256 KB) of flash memory for storing code. The board comes with a bootloader already pre-burned. Available SRAM is 96 KB in two adjacent banks of 64 KB and 32 KB. All available memory (Flash, RAM, and ROM) can be accessed directly as a single address space. You can erase the SAM3X flash memory using a built-in erase button. This will remove a currently loaded thumbnail from the MCU. To wipe the memory, press and hold the "Erase" button for a few seconds while the board is on.Inputs and outputs:
Digital I / O: Total 98. Each of the 98 digital pins on DUEXPRO can be used as an input or output using the pinMode (), digitalWrite () and digitalRead () functions. They operate at 3.3V logiclevel. Each output can provide a current of 3 mA or 15 mA, or consume a current of 6 mA or 9 mA, depending on the output. They also have an internal pull-up resistor (disabled by default) at 100 kΩ. In addition, some contacts have specialized functions:
Serial: 0 (RX) and 1 (TX)
Serial 1: 19 (RX) and 18 (TX)
Serial 2: 17 (RX) and 16 (TX)
Serial 3: 15 (RX) and 14 (TX)
PWM: pins from 2 to 13 Provide 8-bit PWM output using the analogWrite () function. PWM resolution can be changed using the analogWriteResolution () function.
SPI: SPI Header pins support SPI communication using the SPI library. SPI pins have a central 6-pin connector that is physically compatible forUno, Leonardo and Mega2560. The SPI header can only be used to communicate with other SPI devices, and not for SAM3X programming using In-Circuit-Serial-Programming technology.
CAN: CANRX and CANTX pins support the CAN communication protocol.
I2C TWI 1: 20 (SDA) and 21 (SCL)
I2C TWI 2: SDA1 and SCL1 Support TWI communication using the Wire library. SDA1 and SCL1 can be controlled using the Wire1 class provided by the Wire library. While SDA and SCL have internal pull-up resistors, SDA1 and SCL1 do not. Adding two pull-up resistors on the SDA1 and SCL1 lines is required to use Wire1.
Analog inputs: contacts from A0 to A11. Due has 12 analog inputs, each of which can provide 12-bit resolution (that is, 4096 different values). By default, the resolution of the readings is set to 10 bits for compatibility with other Arduinoboards. You can change the resolution of the ADC using the ReadResolution (). Applying a voltage of more than 3.3 V to the contacts DUEXPRO might damage the SAM3X chip. The AnalogReference () function is ignored in DUEXPRO. The AREF pin is connected to the SAM3X analog reference pin through a bridge resistor. To use the AREF pin, resistor BR1 must be disconnected from the board.
DAC1 and DAC2: These pins provide true analog outputs with 12-bit resolution (4096 levels) with the analogWrite () function. They can be used to create audio output using an audio library. Please note that the output range of the DAC is actually only from 0.55 V to 2.75 V. Other pins on the board: AREF Reference voltage for analog inputs. Used with AnalogReference ().
Reset: Set this line LOW to reset the microcontroller. Typically used to add a reset button to shields that block a button on the board.
Communication:
The RobotDyn DUE XPRO has a number of means for communicating with a computer, another Arduinoboard or other microcontrollers, as well as various devices, such as phones, tablets, cameras, etc. The SAM3X provides one hardware UART and three hardware USART for TTL serial communication.
The programming port is connected to the ATmega16U2, which provides a virtual COM port for software on the connected computer (Windows will need an .inf file to recognize the device, but OSX and Linux machines automatically recognize the board as a COM port). The 16U2 is also connected to the hardware UART SAM3X. A serial connection on the RX0 and TX0 pins provides communication between the serial port and USB, for programming the board through the ATmega16U2 microcontroller. The Arduinosoftware includes a serial monitor that allows you to send simple text data to and from the board. The RX and TX indicators on the board will flash when transmitting data through an ATmega16U2 chip and a USB connection to a computer.
The USB port is connected to the SAM3X, it allows for serial communication via USB. This provides a serial connection to the Serial Monitor or other applications on your computer, and will also allow to emulate a USB mouse or keyboard to a connected computer.
The Native USB port can also act as a USB host for connected peripherals, such as mice, keyboards, and smartphones. To use these features, see the USBHost man pages.
SAM3X also supports TWI and SPI communication. The Arduinosoftware includes the Wire library to simplify the use of the TWI bus. For SPI communication, use the SPI library.
Programming:
DUEXPRO can be programmed using the ArduinoIDE. Uploading thumbnails to the SAM3X is different from AVR microcontrollers, which can be found on other Arduinoboards, since flash memory must be erased before being programmed again. The boot to the microcircuit is controlled by a ROM on the SAM3X, which is started only when the flash memory of the chip is empty. Any of the USB ports can be used to program the board, although it is recommended to use the programming port due to the way the chip is erased.
Programming Port: To use this port, select “ArduinoDue (ProgrammingPort)” as the board in the ArduinoIDE “Tools” menu. Connect the DUEXPRO programming port (closest to the DC power connector) to your computer. The programming port uses 16U2 as a USB-to-serial chip connected to the first SAM3X UART (RX0 and TX0). The 16U2 has two pins connected to the SAM3X reset and erase contacts. Opening and closing a programming port connected at 1200 bps starts the “hard erase” procedure for the SAM3X chip, activating the erase and reset contacts on the SAM3X before establishing a connection with the UART. This is the recommended programming port. This is more reliable than the “soft erase” that occurs on its own port, and it should work even if the main MCU fails.
Own port: to use this port, select “ArduinoDue (NativeUSBPort)” as the board in the ArduinoIDE. The native USB port is connected directly to the SAM3X. Connect your own USB port Due (closest to the reset button) to the computer. Opening and closing your own port at 1200 bps starts the “soft erase” procedure: the flash memory is erased and the board reboots with the bootloader.
Unlike other Arduinoboards that use avrdude for download, DUEXPRO relies on the bossac. The ATmega16U2 firmware source code is available in the Arduinorepository. You can use the ISP header with an external programmer (overwriting the DFU bootloader). Protection against overcurrent via USB RobotDyn DUEXPRO has a reloadable polyfuse that protects your computer's USB ports against short circuits and overloads. Although most computers provide their own internal protection, the fuse provides an extra level of protection. If more than 500 mA is connected to the USB port, the fuse will automatically break the connection until the short circuit or overload is removed. Three screw holes allow you to attach the board to the surface or housing. Note that the distance between digital pins 7 and 8 is 160 mil (0.16 inch), which is not a multiple of 100 mil from other pins. RobotDyn DUEXPRO is designed to be compatible with most screens designed forUno, Diecimila or In connection with this digital pins 0–13 (and adjacent pins AREF and GND), analog inputs 0–5, the power header and the ICSP header (SPI) are in equivalent places. Further, the main UART (serial port) is located on the same pins (0 and 1).Documents:
Dimensional drawing: Click here to open
Schematic: Click here to open