Characteristic:
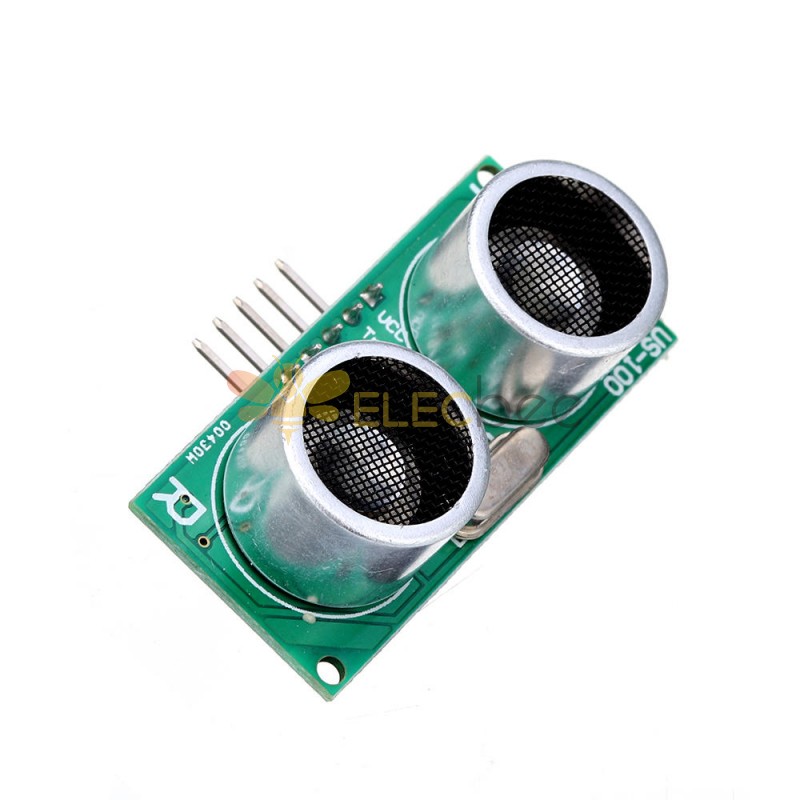
The US-100 ultrasonic ranging module can provide 2cm-450cm non-contact distance sensing function, wide working voltage, self-contained temperature sensor to correct the ranging result, and also has GPIO, serial port and other communication methods. The dog is stable and reliable.
The module includes a transmitter, receiver and control circuit, which is a piezoelectric sensor that is fabricated using electrostrictive phenomena.
An alternating voltage is applied to the piezoelectric material S lice (such as quartz crystal, piezoelectric ceramic, lead bismuth titanate, etc.) to cause it to generate electrostrictive vibration to generate ultrasonic W aves. The resonance is generated when the frequency of the applied alternating voltage is equal to the natural frequency of the wafer, and the ultrasonic W ave generated at this time is the strongest.
Piezoelectric ultrasonic receivers generally operate using the inverse effect of an ultrasonic generator. The structure is basically the same as that of an ultrasonic generator, and sometimes the same transducer is used as both a generator and a receiver.
When the ultrasonic W ave acts on the piezoelectric wafer, the wafer is stretched and contracted, and alternating charges are generated at the two interfaces of the wafer, and then converted into a voltage and amplified to be sent to the measuring circuit, and finally recorded or displayed.| Electrical parameters | US-100 ultrasonic ranging module |
| Operating Voltage | DC 2.4V~5.5V |
| Quiescent Current | 2mA |
| Operating temperature | -20~+70 degrees |
| output method | Level or UART (jumper cap selection) |
| Induction angle | Less than 15 degrees |
| Detection distance | 2cm-450cm |
| Detection accuracy | 0.3cm+1% |
| Serial port configuration in UART mode | The baud rate is 9600, the start bit is 1 bit, the stop bit is 1 bit, the data bit is 8 bits, there is no parity, no flow control. |


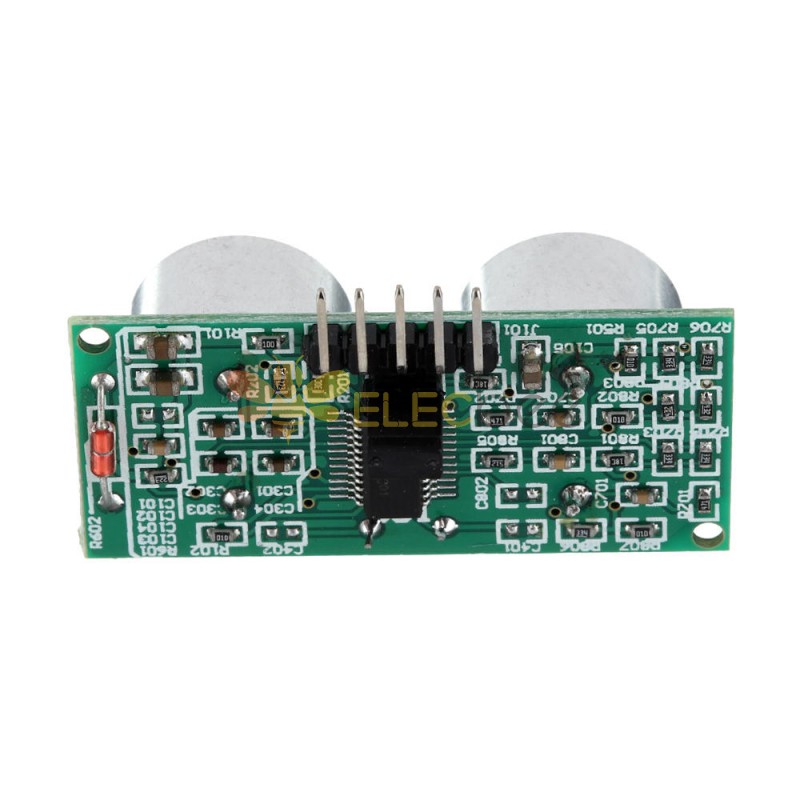
Pin 1: Connect to VCC power supply (DC 2.4V-5.5V).
Pin 2: When it is in UART mode, it is connected to the TX terminal of the external circuit UART; when it is in the level trigger mode, it is connected to the Trig terminal of the external circuit.
Pin 3: When in UART mode, connect to RX terminal of external circuit UART; when it is level trigger mode, connect to Echo terminal of external circuit.
Pin 4/5: Connect the ground of the external circuit, and the two pins are turned on.
Level-triggered ranging works:
Before powering up the module, first remove the jumper cap on the mode selection jumper to put the module in level trigger mode.
It can be seen from the figure that only a high level of 10US or more is required to be input to the Trig/TX pin, and the system can send eight 40KHZ ultrasonic pulses and then detect the echo signal. When the echo signal is detected, the module also measures the temperature value, then corrects the ranging result according to the current temperature, and outputs the corrected result through the Echo/RX pin. In this mode, the module converts the distance value to twice the time value at 340m/s, outputs a high level through the Echo terminal, and simultaneously starts the timer, and can read the timer when the port goes low. The value of the high level is the time from the transmission to the return of the ultrasonic W ave. The distance value can be calculated based on the duration of this high level. That is, the distance value is: (high time *340m/s)/2.
Note: Since the distance value has been temperature corrected, it is no longer necessary to correct the ultrasonic sound speed according to the ambient temperature, that is, the sound speed is 340m/s regardless of the temperature.
Serial port triggering ranging works:
Before the module is powered on, first plug in the jumper cap on the mode selection jumper to make the module in serial port trigger mode.
In this mode, only need to input 0X55 (baud rate 9600) on the Trig/TX pin, the system can send 8 40KHZ ultrasonic pulses and then detect the echo signal. When the echo signal is detected, the module also measures the temperature value, then corrects the ranging result according to the current temperature, and outputs the corrected result through the Echo/RX pin. The output distance value is a total of two bytes, the first byte is the upper 8 bits of the distance (HDate), and the second byte is the lower 8 bits of the distance (LData), in millimeters. That is, the distance value is (HData*256 + LData) mm.
Serial port trigger temperature measurement working principle:
Before the module is powered on, first plug in the jumper cap on the mode selection jumper to make the module in serial port trigger mode.
In this mode, only need to input 0X50 (baud rate 9600) on the Trig/TX pin, the system will start the temperature sensor to measure the current temperature, and then output the temperature value through the Echo/RX pin. After measuring the completion temperature, the module will return a byte temperature value (TData), the actual temperature value is TData-45. For example, after sending 0X50 through TX and receiving 0X45 on RX, the temperature value at this time is [69 (0X45 decimal value) -45] = 24 degrees.
Precautions:
1. This module should not be connected with power. If you want to have a live connection, first connect the GND terminal of the module first, otherwise it will affect the normal operation of the module.
2. When measuring distance, the area of the measured object is not less than 0.5 square meters and the plane should be flat as much as possible, otherwise the measurement result will be affected.
3. If the test surface is not very regular or when testing a distant object, multiple measurements can be used to correct it.
5 x US-100 Ultrasonic Ranging Module