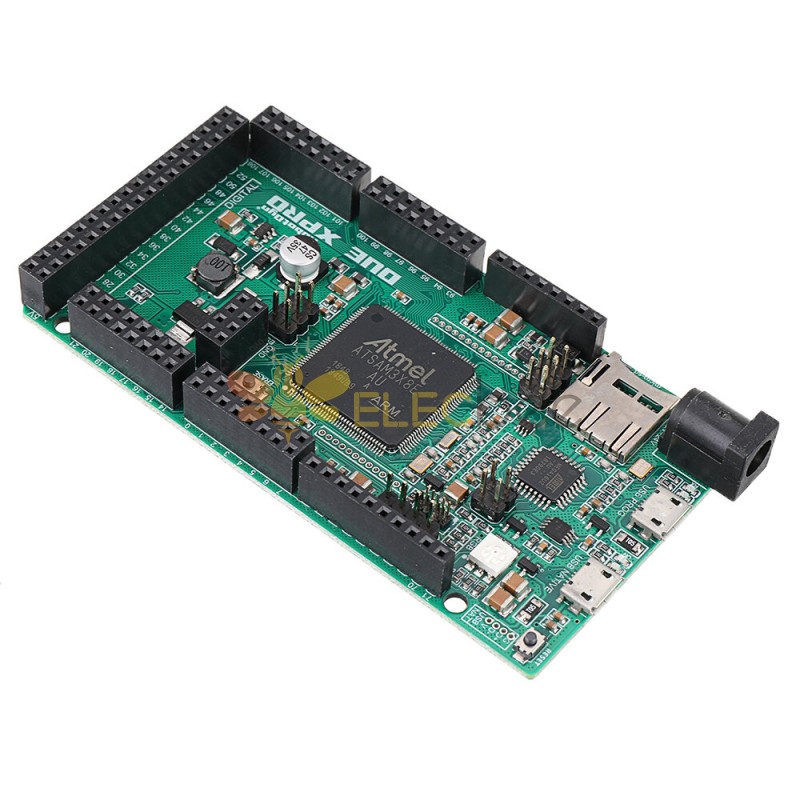
SAM3X8E ARM Cortex-M3 기반 마이크로컨트롤러 보드입니다. 이것은 32비트 ARM 코어를 기반으로 하는 몇 안 되는 보드 중 하나입니다. 일반 ArduinoDUO 보드의 업그레이드 버전으로 98개의 디지털 입력/출력(원래 모델보다 30개 더 많음), 12개의 아날로그 입력, 4개의 UART(하드웨어 직렬 포트), 84MHz 클록 주파수, USB OTG 연결, 2개의 DAC가 있습니다. (D/A), TWI, 전원 커넥터, SPI 헤더, JTAG 헤더, 리셋 버튼 및 지우기 버튼. 또한 보드에는 Wi-Fi 모듈 ESP-01용 Micro-SD 카드 리더기와 소켓이 있습니다.
컨트롤러는 3.3V 로직 레벨에서 작동합니다. 보드에는 USB 인터페이스가 있습니다. 마이크로 USB 케이블로 컴퓨터에 연결하거나 AC 어댑터 또는 배터리와 연결하여 작업을 시작하십시오. RobotDyn DUE XPRO는 모든 Arduino 지원 장치와 호환됩니다.
이오레프:
올바른 구성으로 연결된 디스플레이가 보드에서 제공하는 전압에 적응할 수 있습니다. 이렇게 하면 화면이 5V에서 작동하는 Due 및 AVR 보드와 같은 3.3V 보드와 호환됩니다.
힘:
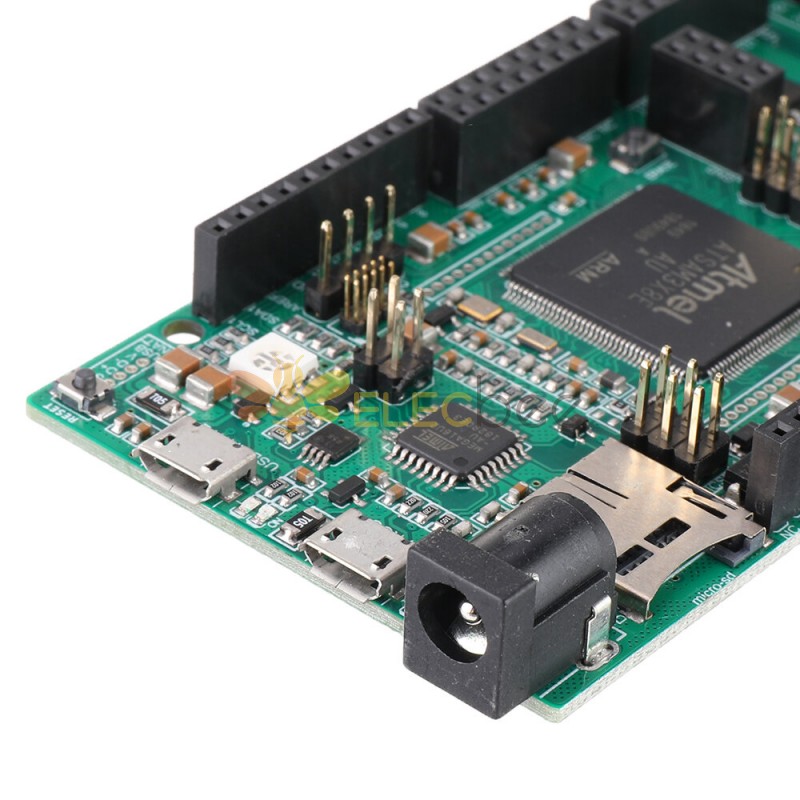
RobotDyn DUEXPRO는 USB 커넥터 또는 외부 전원으로 전원을 공급받을 수 있습니다. 전원이 자동으로 선택됩니다. 외부(비 USB) 전원은 AC 어댑터에서 직류로 또는 배터리에서 공급할 수 있습니다. 어댑터는 카드의 전원 커넥터에 2.1mm 중앙 양극 플러그를 삽입하여 연결할 수 있습니다. 배터리 핀은 POWER 커넥터의 GND 및 VIN 핀에 꽂을 수 있습니다. 이 보드는 6~20볼트의 외부 전원에서 작동할 수 있으며 권장 범위는 7~12볼트입니다. 전원 핀은 다음과 같습니다.
VIN - 외부 전원 공급 장치를 사용할 때 Arduinoboard의 입력 전압(USB 연결의 5볼트와 반대). 이 접점을 통해 보드에 전원을 공급하거나 USB 케이블을 통해 전원을 공급하는 경우 액세스할 수 있습니다.
5V - 이 핀 출력은 조정 가능한 전압 조정기의 도움으로 보드에 5V 전류를 제공합니다. 보드는 DC 전원 커넥터(7–12V), USB 커넥터(5V) 또는 보드의 VIN 핀(7–12V)에서 전원을 공급받을 수 있습니다. 5V 또는 3.3V 핀을 통해 전압을 적용하면 레귤레이터를 우회하므로 전압이 안정적이고 허용 가능한 범위 내에 있는지 확인하십시오.
3V - 내장 레귤레이터에서 3.3V의 전원을 공급합니다. 최대 소비 전류는 800mA입니다. 이 컨트롤러는 SAM3X 마이크로컨트롤러에도 전원을 공급합니다.
GND – 접지 핀.
IOREF - DUEXPRO 보드의 이 핀은 마이크로컨트롤러가 작동하는 기준 소스를 제공합니다. 적절하게 구성된 화면은 IOREF 접점의 전압을 읽고 적절한 전원을 선택하거나 출력에서 전압 변환기를 켜서 5V 또는 3.3V에서 작동할 수 있습니다.
메모리:
SAM3X에는 코드 저장을 위한 512KB(256KB의 2개 블록) 플래시 메모리가 있습니다. 이 보드는 이미 사전에 구워진 부트로더와 함께 제공됩니다. 사용 가능한 SRAM은 64KB와 32KB의 인접한 두 뱅크에서 96KB입니다. 사용 가능한 모든 메모리(플래시, RAM 및 ROM)는 단일 주소 공간으로 직접 액세스할 수 있습니다. 내장된 지우기 버튼을 사용하여 SAM3X 플래시 메모리를 지울 수 있습니다. 이렇게 하면 현재 로드된 썸네일이 MCU에서 제거됩니다. 메모리를 지우려면 보드가 켜진 상태에서 "지우기" 버튼을 몇 초 동안 누르고 있습니다.입력 및 출력:
디지털 I/O: 총 98개. DUEXPRO의 98개 디지털 핀 각각은 pinMode(), digitalWrite() 및 digitalRead() 기능을 사용하여 입력 또는 출력으로 사용할 수 있습니다. 3.3V 로직 레벨에서 작동합니다. 각 출력은 출력에 따라 3mA 또는 15mA의 전류를 제공하거나 6mA 또는 9mA의 전류를 소비할 수 있습니다. 또한 100kΩ에서 내부 풀업 저항(기본적으로 비활성화됨)이 있습니다. 또한 일부 연락처에는 특수 기능이 있습니다.
직렬: 0(RX) 및 1(TX)
직렬 1: 19(RX) 및 18(TX)
직렬 2: 17(RX) 및 16(TX)
직렬 3: 15(RX) 및 14(TX)
PWM: 2에서 13까지의 핀 analogWrite() 함수를 사용하여 8비트 PWM 출력을 제공합니다. PWM 해상도는 analogWriteResolution() 함수를 사용하여 변경할 수 있습니다.
SPI: SPI 헤더 핀은 SPI 라이브러리를 사용하여 SPI 통신을 지원합니다. SPI 핀에는 Uno, Leonardo 및 Mega2560과 물리적으로 호환되는 중앙 6핀 커넥터가 있습니다. SPI 헤더는 다른 SPI 장치와 통신하는 데에만 사용할 수 있으며 In-Circuit-Serial-Programming 기술을 사용하는 SAM3X 프로그래밍에는 사용할 수 없습니다.
CAN: CANRX 및 CANTX 핀은 CAN 통신 프로토콜을 지원합니다.
I2C TWI 1: 20(SDA) 및 21(SCL)
I2C TWI 2: SDA1 및 SCL1은 Wire 라이브러리를 사용하여 TWI 통신을 지원합니다. SDA1 및 SCL1은 Wire 라이브러리에서 제공하는 Wire1 클래스를 사용하여 제어할 수 있습니다. SDA와 SCL에는 내부 풀업 저항이 있지만 SDA1과 SCL1에는 없습니다. Wire1을 사용하려면 SDA1 및 SCL1 라인에 두 개의 풀업 저항을 추가해야 합니다.
아날로그 입력: A0에서 A11까지의 접점. Due에는 12개의 아날로그 입력이 있으며 각 입력은 12비트 분해능(즉, 4096개의 서로 다른 값)을 제공할 수 있습니다. 기본적으로 판독값의 해상도는 다른 Arduinoboard와의 호환성을 위해 10비트로 설정됩니다. ReadResolution()을 사용하여 ADC의 해상도를 변경할 수 있습니다. DUEXPRO 접점에 3.3V 이상의 전압을 가하면 SAM3X 칩이 손상될 수 있습니다. AnalogReference() 함수는 DUEXPRO에서 무시됩니다. AREF 핀은 브리지 저항을 통해 SAM3X 아날로그 기준 핀에 연결됩니다. AREF 핀을 사용하려면 저항 BR1을 보드에서 분리해야 합니다.
DAC1 및 DAC2: 이 핀은 analogWrite() 기능으로 12비트 분해능(4096 레벨)의 진정한 아날로그 출력을 제공합니다. 오디오 라이브러리를 사용하여 오디오 출력을 만드는 데 사용할 수 있습니다. DAC의 출력 범위는 실제로 0.55V ~ 2.75V에 불과합니다. 보드의 다른 핀: 아날로그 입력을 위한 AREF 기준 전압. AnalogReference()와 함께 사용됩니다.
재설정: 이 라인을 LOW로 설정하여 마이크로컨트롤러를 재설정합니다. 일반적으로 보드의 버튼을 차단하는 실드에 리셋 버튼을 추가하는 데 사용됩니다.
의사소통:
RobotDyn DUE XPRO는 컴퓨터, 다른 아두이노보드 또는 기타 마이크로컨트롤러는 물론 전화, 태블릿, 카메라 등과 같은 다양한 장치와 통신하기 위한 여러 가지 수단을 가지고 있습니다. SAM3X는 TTL 직렬용 하드웨어 UART 1개와 하드웨어 USART 3개를 제공합니다. 의사소통.
프로그래밍 포트는 연결된 컴퓨터의 소프트웨어에 대한 가상 COM 포트를 제공하는 ATmega16U2에 연결됩니다(Windows는 장치를 인식하기 위해 .inf 파일이 필요하지만 OSX 및 Linux 시스템은 자동으로 보드를 COM 포트로 인식합니다). 16U2는 하드웨어 UART SAM3X에도 연결됩니다. RX0 및 TX0 핀의 직렬 연결은 ATmega16U2 마이크로컨트롤러를 통해 보드를 프로그래밍하기 위해 직렬 포트와 USB 간의 통신을 제공합니다. Arduinosoftware에는 보드와 간단한 텍스트 데이터를 주고 받을 수 있는 직렬 모니터가 포함되어 있습니다. ATmega16U2 칩과 USB 연결을 통해 컴퓨터에 데이터를 전송할 때 보드의 RX 및 TX 표시등이 깜박입니다.
USB 포트는 SAM3X에 연결되어 있어 USB를 통한 직렬 통신이 가능합니다. 이렇게 하면 직렬 모니터 또는 컴퓨터의 다른 응용 프로그램에 대한 직렬 연결을 제공하고 연결된 컴퓨터에 USB 마우스 또는 키보드를 에뮬레이트할 수도 있습니다.
기본 USB 포트는 마우스, 키보드 및 스마트폰과 같은 연결된 주변 장치를 위한 USB 호스트 역할도 할 수 있습니다. 이러한 기능을 사용하려면 USBHost 매뉴얼 페이지를 참조하십시오.
SAM3X는 TWI 및 SPI 통신도 지원합니다. Arduinosoftware에는 TWI 버스 사용을 단순화하는 Wire 라이브러리가 포함되어 있습니다. SPI 통신을 위해서는 SPI 라이브러리를 사용하십시오.
프로그램 작성:
DUEXPRO는 ArduinoIDE를 사용하여 프로그래밍할 수 있습니다. SAM3X에 섬네일을 업로드하는 것은 다시 프로그래밍하기 전에 플래시 메모리를 지워야 하기 때문에 다른 Arduinoboard에서 찾을 수 있는 AVR 마이크로 컨트롤러와 다릅니다. 칩의 플래시 메모리가 비어 있을 때만 시작되는 SAM3X의 ROM이 미세 회로로의 부팅을 제어합니다. 모든 USB 포트를 사용하여 보드를 프로그래밍할 수 있지만 칩이 지워지는 방식으로 인해 프로그래밍 포트를 사용하는 것이 좋습니다.
프로그래밍 포트: 이 포트를 사용하려면 ArduinoIDE "도구" 메뉴에서 보드로 "ArduinoDue(프로그래밍 포트)"를 선택합니다. DUEXPRO 프로그래밍 포트(DC 전원 커넥터에 가장 가까운 포트)를 컴퓨터에 연결합니다. 프로그래밍 포트는 16U2를 첫 번째 SAM3X UART(RX0 및 TX0)에 연결된 USB-직렬 칩으로 사용합니다. 16U2에는 SAM3X 재설정 및 지우기 접점에 연결된 두 개의 핀이 있습니다. 1200bps로 연결된 프로그래밍 포트를 열고 닫으면 SAM3X 칩에 대한 "하드 지우기" 절차가 시작되어 UART와의 연결을 설정하기 전에 SAM3X에서 지우기 및 재설정 접점이 활성화됩니다. 권장되는 프로그래밍 포트입니다. 이는 자체 포트에서 발생하는 "소프트 지우기"보다 더 안정적이며 메인 MCU가 실패하더라도 작동해야 합니다.
자체 포트: 이 포트를 사용하려면 ArduinoIDE에서 보드로 "ArduinoDue(NativeUSBPort)"를 선택합니다. 기본 USB 포트는 SAM3X에 직접 연결됩니다. 자신의 USB 포트 Due(리셋 버튼에 가장 가까운)를 컴퓨터에 연결합니다. 1200bps에서 자신의 포트를 열고 닫으면 "소프트 지우기" 절차가 시작됩니다. 플래시 메모리가 지워지고 보드가 부트로더와 함께 재부팅됩니다.
다운로드를 위해 avrdude를 사용하는 다른 Arduinoboard와 달리 DUEXPRO는 bossac에 의존합니다. ATmega16U2 펌웨어 소스 코드는 Arduinorepository에서 사용할 수 있습니다. 외부 프로그래머와 함께 ISP 헤더를 사용할 수 있습니다(DFU 부트로더 덮어쓰기). USB를 통한 과전류 방지 RobotDyn DUEXPRO에는 단락 및 과부하로부터 컴퓨터의 USB 포트를 보호하는 재충전 가능한 폴리퓨즈가 있습니다. 대부분의 컴퓨터는 자체 내부 보호 기능을 제공하지만 퓨즈는 추가적인 보호 기능을 제공합니다. USB 포트에 500mA 이상이 연결되어 있으면 단락 또는 과부하가 제거될 때까지 퓨즈가 자동으로 연결을 끊습니다. 3개의 나사 구멍을 사용하여 보드를 표면 또는 하우징에 부착할 수 있습니다. 디지털 핀 7과 8 사이의 거리는 160mil(0.16인치)이며, 이는 다른 핀에서 100mil의 배수가 아닙니다. RobotDyn DUEXPRO는 Uno, Diecimila 또는 이 디지털 핀 0-13(및 인접 핀 AREF 및 GND), 아날로그 입력 0-5, 전원 헤더 및 ICSP 헤더(SPI)와 연결하여 설계된 대부분의 화면과 호환되도록 설계되었습니다. 동등한 장소에서. 또한 메인 UART(직렬 포트)는 동일한 핀(0 및 1)에 있습니다.서류:
치수 도면: 열려면 여기를 클릭하십시오.
설계도: 열려면 여기를 클릭하십시오.